I2C
I2C(Inter-IC Communication. IIC), 也是使用非常广泛的同步串行总线, 支持多控制器,多从设备的总线,只需要 SCL 和 CLK两根线即可,与 UART 串口不同的是, I2C 总线支持总线仲裁,解决多主设备同时发送时数据冲突问题,同时主从设备通信更稳定,因为使用时钟线 CLK 用于同步收发双方的速度。
I2C 总线支持一个主机并联多个从设备。通常使用拓扑如下:
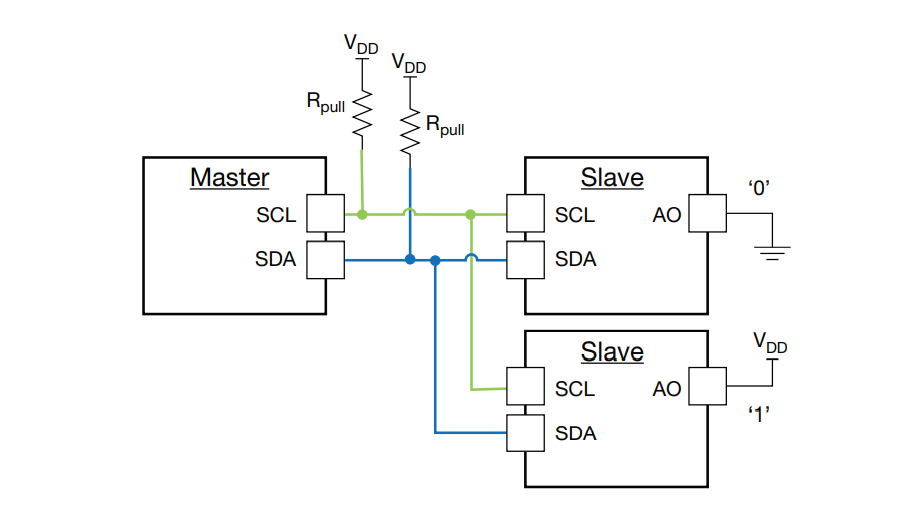
I2C 总线常用于板内设备通信,如M应用与CU与传感器、控制电路、屏幕等设备之间的通信。 各从设备都具备一个 I2C 地址,且同一并联的总线不能有相同的地址。I2C 的时钟与数据线有着严格的时序要求。
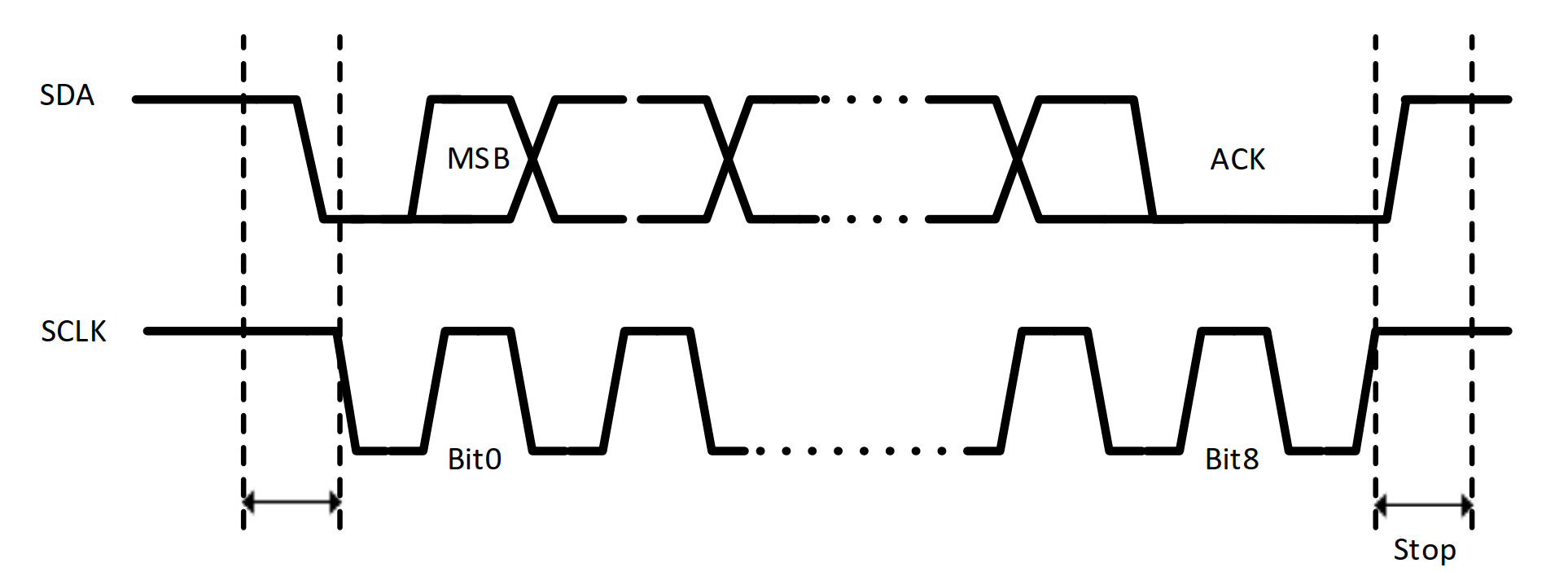
- 起始信号:SCL保持高,SDA下降沿
- 停止信号:SCL保持高,SDA上升沿
- 采集数据:SDA稳定,SCL上升沿
- ACK信号:接收方拉低SDA后,主机在SCL上升沿接收到低电平
- NACK信号:
示例:examples/i2c_master_block.rs
#![no_std] #![no_main] use defmt::Debug2Format; // use embedded_io::Write; use embedded_hal::digital::v2::OutputPin; use hal::delay; use hal::i2c::{AnyI2c, Config}; use py32f030_hal::delay::delay_ms; use py32f030_hal::gpio::{Output, PinIoType, PinSpeed}; use py32f030_hal::{self as hal, mode::Blocking}; use {defmt_rtt as _, panic_probe as _}; #[cortex_m_rt::entry] fn main() -> ! { defmt::info!("i2c start..."); let p = hal::init(Default::default()); let gpioa = p.GPIOA.split(); let mut lcd_rst = Output::new(gpioa.PA4, PinIoType::PullUp, PinSpeed::Low); let _ = lcd_rst.set_low(); delay_ms(200); let _ = lcd_rst.set_high(); let sda = gpioa.PA2; let scl = gpioa.PA3; let config = Config::default().speed(200_000); // 配置 200K的速度 let i2c1 = AnyI2c::<_, Blocking>::new(p.I2C, scl, sda, config).unwrap(); let master = i2c1.as_master(); let buf: [u8; 10] = [1, 2, 3, 4, 5, 6, 7, 8, 9, 0]; let mut r_buf: [u8; 2] = [0; 2]; let mut cnt = 0; const SLAVE_DEVICE_ADDRESS: u8 = 0x3c; loop { // write from i2c let rst = master.write_block(SLAVE_DEVICE_ADDRESS, &buf); defmt::info!("write rst: {:?} ", Debug2Format(&rst)); if rst.is_err() { // master.clear_errors() } // read from i2c let rst = master.read_block(SLAVE_DEVICE_ADDRESS, &mut r_buf); defmt::info!("read rst: {:?} ", Debug2Format(&rst)); delay::delay_ms(1000); defmt::info!("{}", cnt); cnt += 1; } }