Rust嵌入式中如何使用中断服务函数
在 CPU 在正常执行指令序列时,当外部源(外设信号或GPIO引脚)或内部(指令异常、总线错误等)触发 CPU 暂停当前工作,跳转到相应的服务函数入口执行紧急任务。
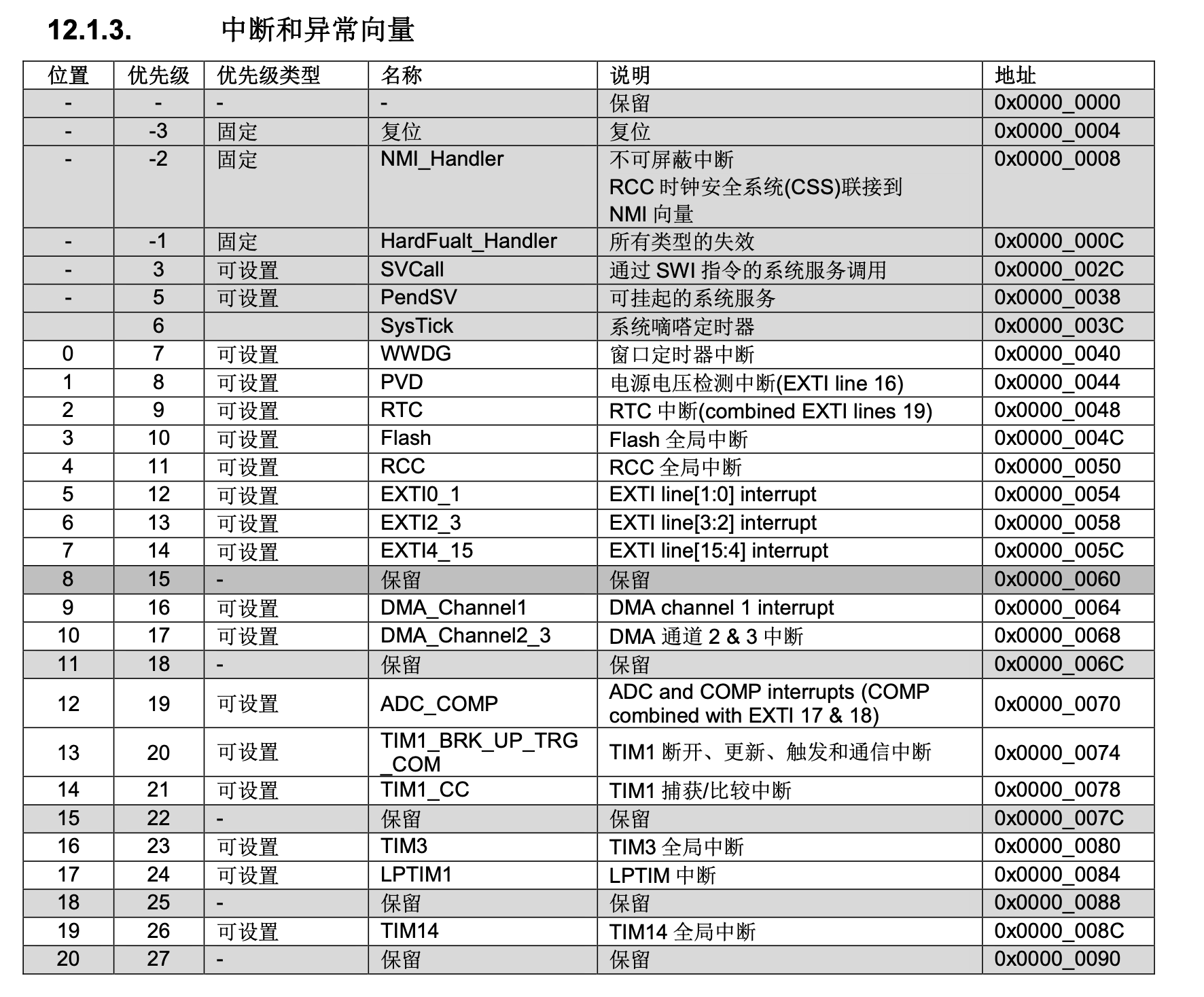
对于每个中断类型都需要指定一个中断处理函数,这些中断处理函数的地址组成中断向量表,当发生中断时,如果中断使能,CPU 会自动跳转的相应的中断处理函数去执行中断处理任务。
Py32f030 中断
主要特性如下:
- 32 个可屏蔽的中断通道(不包括 16 个 CPU 的中断)
- 4 个可编程的优先级(2 位中断优先级)
代码实现
Py32f030 的内核为 Cortex-M0+ 内核,内核的标准中断抽象在 cortex-m-rt,这部分的中断抽象实现在文件:src/lib.rs
#![allow(unused)] fn main() { /* Exceptions */ #[doc(hidden)] pub enum Exception { NonMaskableInt, // Not overridable // HardFault, #[cfg(not(armv6m))] MemoryManagement, #[cfg(not(armv6m))] BusFault, #[cfg(not(armv6m))] UsageFault, #[cfg(armv8m)] SecureFault, SVCall, #[cfg(not(armv6m))] DebugMonitor, PendSV, SysTick, } #[doc(hidden)] pub use self::Exception as exception; extern "C" { fn Reset() -> !; fn NonMaskableInt(); fn HardFaultTrampoline(); #[cfg(not(armv6m))] fn MemoryManagement(); #[cfg(not(armv6m))] fn BusFault(); #[cfg(not(armv6m))] fn UsageFault(); #[cfg(armv8m)] fn SecureFault(); fn SVCall(); #[cfg(not(armv6m))] fn DebugMonitor(); fn PendSV(); fn SysTick(); } #[doc(hidden)] pub union Vector { handler: unsafe extern "C" fn(), reserved: usize, } #[doc(hidden)] #[cfg_attr(cortex_m, link_section = ".vector_table.exceptions")] #[no_mangle] pub static __EXCEPTIONS: [Vector; 14] = [ // Exception 2: Non Maskable Interrupt. Vector { handler: NonMaskableInt, }, // Exception 3: Hard Fault Interrupt. Vector { handler: HardFaultTrampoline, }, // Exception 4: Memory Management Interrupt [not on Cortex-M0 variants]. #[cfg(not(armv6m))] Vector { handler: MemoryManagement, }, #[cfg(armv6m)] Vector { reserved: 0 }, // Exception 5: Bus Fault Interrupt [not on Cortex-M0 variants]. #[cfg(not(armv6m))] Vector { handler: BusFault }, #[cfg(armv6m)] Vector { reserved: 0 }, // Exception 6: Usage Fault Interrupt [not on Cortex-M0 variants]. #[cfg(not(armv6m))] Vector { handler: UsageFault, }, #[cfg(armv6m)] Vector { reserved: 0 }, // Exception 7: Secure Fault Interrupt [only on Armv8-M]. #[cfg(armv8m)] Vector { handler: SecureFault, }, #[cfg(not(armv8m))] Vector { reserved: 0 }, // 8-10: Reserved Vector { reserved: 0 }, Vector { reserved: 0 }, Vector { reserved: 0 }, // Exception 11: SV Call Interrupt. Vector { handler: SVCall }, // Exception 12: Debug Monitor Interrupt [not on Cortex-M0 variants]. #[cfg(not(armv6m))] Vector { handler: DebugMonitor, }, #[cfg(armv6m)] Vector { reserved: 0 }, // 13: Reserved Vector { reserved: 0 }, // Exception 14: Pend SV Interrupt [not on Cortex-M0 variants]. Vector { handler: PendSV }, // Exception 15: System Tick Interrupt. Vector { handler: SysTick }, ]; // If we are not targeting a specific device we bind all the potential device specific interrupts // to the default handler #[cfg(all(any(not(feature = "device"), test), not(armv6m)))] #[doc(hidden)] #[cfg_attr(cortex_m, link_section = ".vector_table.interrupts")] #[no_mangle] pub static __INTERRUPTS: [unsafe extern "C" fn(); 240] = [{ extern "C" { fn DefaultHandler(); } DefaultHandler }; 240]; // ARMv6-M can only have a maximum of 32 device specific interrupts #[cfg(all(not(feature = "device"), armv6m))] #[doc(hidden)] #[link_section = ".vector_table.interrupts"] #[no_mangle] pub static __INTERRUPTS: [unsafe extern "C" fn(); 32] = [{ extern "C" { fn DefaultHandler(); } DefaultHandler }; 32]; }
Py32f030 的芯片中断抽象在 PY32f030xx-pac 已经自动实现。
中断向量表的定义在文件:src/lib.rs +35
#![allow(unused)] fn main() { #[cfg(feature = "rt")] extern "C" { fn WWDG(); fn PVD(); fn RTC(); fn FLASH(); fn RCC(); fn EXTI0_1(); fn EXTI2_3(); fn EXTI4_15(); fn DMA_CHANNEL1(); fn DMA_CHANNEL2_3(); fn ADC_COMP(); fn TIM1_BRK_UP_TRG_COM(); fn TIM1_CC(); fn TIM3(); fn TIM14(); fn TIM16(); fn TIM17(); fn I2C1(); fn SPI1(); fn SPI2(); fn USART1(); fn USART2(); fn LED(); } #[doc(hidden)] pub union Vector { _handler: unsafe extern "C" fn(), _reserved: u32, } #[cfg(feature = "rt")] #[doc(hidden)] #[link_section = ".vector_table.interrupts"] #[no_mangle] pub static __INTERRUPTS: [Vector; 31] = [ Vector { _handler: WWDG }, Vector { _handler: PVD }, Vector { _handler: RTC }, Vector { _handler: FLASH }, Vector { _handler: RCC }, Vector { _handler: EXTI0_1 }, Vector { _handler: EXTI2_3 }, Vector { _handler: EXTI4_15 }, Vector { _reserved: 0 }, Vector { _handler: DMA_CHANNEL1, }, Vector { _handler: DMA_CHANNEL2_3, }, Vector { _reserved: 0 }, Vector { _handler: ADC_COMP }, Vector { _handler: TIM1_BRK_UP_TRG_COM, }, Vector { _handler: TIM1_CC }, Vector { _reserved: 0 }, Vector { _handler: TIM3 }, Vector { _reserved: 0 }, Vector { _reserved: 0 }, Vector { _handler: TIM14 }, Vector { _reserved: 0 }, Vector { _handler: TIM16 }, Vector { _handler: TIM17 }, Vector { _handler: I2C1 }, Vector { _reserved: 0 }, Vector { _handler: SPI1 }, Vector { _handler: SPI2 }, Vector { _handler: USART1 }, Vector { _handler: USART2 }, Vector { _reserved: 0 }, Vector { _handler: LED }, ]; #[doc = r"Enumeration of all the interrupts."] #[derive(Copy, Clone, Debug, PartialEq, Eq)] #[repr(u16)] pub enum Interrupt { #[doc = "0 - Window WatchDog Interrupt"] WWDG = 0, #[doc = "1 - PVD Interrupt through EXTI Lines 16"] PVD = 1, #[doc = "2 - RTC Interrupt through EXTI Lines 19"] RTC = 2, #[doc = "3 - FLASH global Interrupt"] FLASH = 3, #[doc = "4 - RCC global Interrupt"] RCC = 4, #[doc = "5 - EXTI Line 0 and 1 Interrupt"] EXTI0_1 = 5, #[doc = "6 - EXTI Line 2 and 3 Interrupt"] EXTI2_3 = 6, #[doc = "7 - EXTI Line 4 to 15 Interrupt"] EXTI4_15 = 7, #[doc = "9 - DMA Channel 1 Interrupt"] DMA_CHANNEL1 = 9, #[doc = "10 - DMA Channel 2 and Channel 3 Interrupt"] DMA_CHANNEL2_3 = 10, #[doc = "12 - ADC and COMP Interrupt through EXTI Lines 17 and 18"] ADC_COMP = 12, #[doc = "13 - TIM1 Break, Update, Trigger and Commutation Interrupt"] TIM1_BRK_UP_TRG_COM = 13, #[doc = "14 - TIM1 Capture Compare Interrupt"] TIM1_CC = 14, #[doc = "16 - TIM3 global Interrupt"] TIM3 = 16, #[doc = "19 - TIM14 global Interrupt"] TIM14 = 19, #[doc = "21 - TIM16 global Interrupt"] TIM16 = 21, #[doc = "22 - TIM17 global Interrupt"] TIM17 = 22, #[doc = "23 - I2C1 global Interrupt"] I2C1 = 23, #[doc = "25 - SPI1 global Interrupt"] SPI1 = 25, #[doc = "26 - SPI2 global Interrupt"] SPI2 = 26, #[doc = "27 - USART1 global Interrupt"] USART1 = 27, #[doc = "28 - USART2 global Interrupt"] USART2 = 28, #[doc = "30 - LED global Interrupt"] LED = 30, } unsafe impl cortex_m::interrupt::InterruptNumber for Interrupt { #[inline(always)] fn number(self) -> u16 { self as u16 } } }
中断服务函数的实现
尽管 PY32f030xx-pac crate 已经对所有的中断进行了抽象,但对于中断服务函数的实现只做了默认的空函数,如果需要重写某个中断服务函数,也非常简单, 与嵌入式 C 的方式原理一样。中断函数名必须与中断向量表中预定的函数名保持一致,且添加属性 #[interrupt]。如下所示展示串口1 和串口2的中断服务函数:
#![allow(unused)] fn main() { use crate::pac::interrupt; #[interrupt] fn USART1() { critical_section::with(|cs| unsafe { EventFuture::<USART1>::on_interrupt(cs, Id::USART1 as usize) }) } #[interrupt] fn USART2() { critical_section::with(|cs| unsafe { EventFuture::<USART2>::on_interrupt(cs, Id::USART2 as usize) }) } }